ANALYSIS TYPE / 04
Point Cloud Simulation · Detection Performance · Adverse Weather
Overview
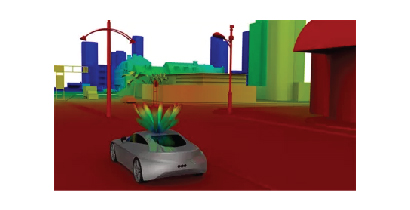
LiDAR simulation models the full system optical chain — emitter, beam steering, propagation, target interaction, and detector — enabling performance prediction for ranging accuracy, field of view, and detection probability in automotive ADAS systems. Adverse weather modelling quantifies the reduction in detection range and increase in false alarm rate due to rain, fog, snow, and direct solar illumination — providing validated performance envelopes that inform sensor specification and sensor fusion algorithm design.
Industries Served
Deliverables
Key Aspects
Simulating VCSEL or fibre laser emitter divergence, pulse shape, and steering mechanism — mechanically rotating, MEMS mirror, OPA, or flash — to predict the beam footprint at range.
Computing the optical return power as a function of target reflectivity, range, incidence angle, and surface roughness — predicting the signal margin at the minimum detectable range.
Simulating the effect of rain, fog, snow, and direct solar illumination on LiDAR detection range and false alarm rate — quantifying the performance degradation at different weather conditions.
Predicting angular resolution, range precision, and point density across the field of view — evaluating the minimum object size detectable at different ranges and velocities.
Connect with our optics & photonics simulation team to discuss the right approach for your application.