Sensor Simulation · Intelligent Headlamps · AV Validation · ADAS/AD Development
Our simulation suite offers a comprehensive solution for accelerating the development of ADAS and autonomous driving technologies — providing a cost-effective alternative to physical prototypes, enabling virtual testing and analysis of radar, lidar, and camera sensors within realistic driving scenarios.
What We Do
Validating ADAS and autonomous driving systems through physical testing alone is statistically infeasible — the scenario space required demands billions of kilometres of driving. Our virtual simulation environments make comprehensive validation achievable by enabling millions of scenario variations in simulation, including safety-critical edge cases that cannot be safely reproduced on physical roads.
Key Problems We Solve
4 Service Types
Select a capability to explore the methodology, deliverables, and tools in detail.
ANALYSIS TYPE / 01
radar · lidar · camera · MiL/SiL/HiL
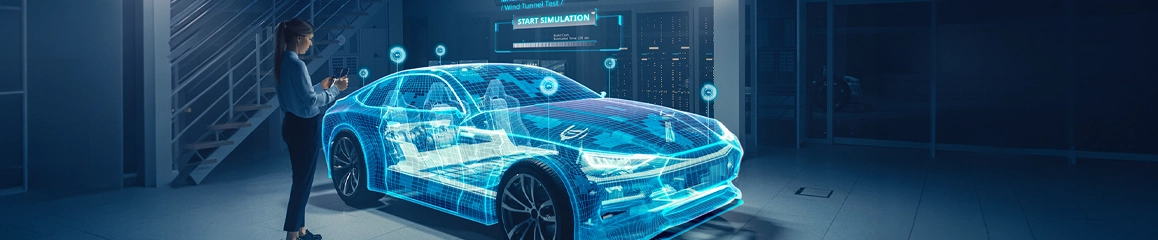
Our sensor simulation solution provides a cost-effective alternative to physical prototypes, accelerating the design process. It enables virtual testing and analysis of sensors — such as radar, lidar, and camera sensors — within realistic driving scenarios, allowing for comprehensive examination of sensor perception in both MiL/SiL and HiL contexts.
Key Aspects
Simulating physics-based radar and lidar sensor models in virtual environments — generating realistic point clouds and detection outputs for perception algorithm development and validation.
Rendering photorealistic camera images under varied lighting, weather, and road conditions — providing diverse training and test data for vision-based perception systems.
Running perception algorithms against simulated sensor data in Model-in-the-Loop and Software-in-the-Loop environments — enabling early algorithm validation without physical hardware.
Deploying sensor simulation on HIL platforms for closed-loop real-time testing — validating the complete sensor-to-actuator chain with ECU hardware in the loop.
ANALYSIS TYPE / 02
real-time headlight · glare assessment · driver-in-the-loop
Our Intelligent Headlamp Simulation solution enables vehicle headlight simulation to test lighting systems in a controlled environment — covering real-time headlight simulation, C++/Simulink plugin for control law development, discomfort glare assessment, multiscreen driving simulator, advanced headlights (matrix beams, pixel beams), IIHS virtual regulation, sensor camera model, smart HL simulation, photometric analysis tools, and driver-in-the-loop assessment.
Key Aspects
Simulating adaptive headlamp behaviour in real time within a driving simulator — validating light distribution, beam switching logic, and glare avoidance under realistic night driving scenarios.
Evaluating glare exposure for oncoming drivers and pedestrians using photometric models — verifying compliance with IIHS Virtual Regulation and ECE R123 requirements.
Validating matrix beam and pixel beam headlight systems — simulating selective pixel deactivation, adaptive high beam assist, and camera-based oncoming vehicle detection.
Integrating headlamp simulation with a driver-in-the-loop simulator — capturing subjective driver assessment of lighting performance across a range of road and traffic scenarios.
ANALYSIS TYPE / 03
MBSE-driven · cloud-native · L2+/L3 ADAS/AD validation
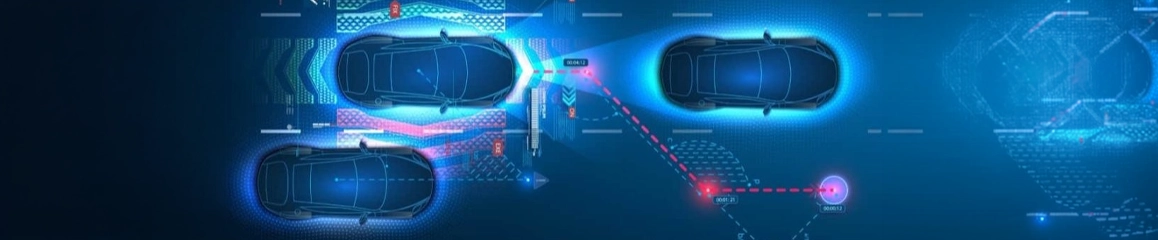
Our Autonomous Vehicle Simulation solution facilitates the development of L2+, L3, and higher-level ADAS/AD systems by simulating the majority of required driving tests through virtual simulation. Using an MBSE-driven, cloud-native, modular simulation toolchain for safety validation, companies can achieve up to a 100,000x reduction in cost and time to compliance.
Key Aspects
Building physics-accurate virtual environments that recreate real-world driving conditions at scale — enabling thousands of scenario variations to be evaluated before a single kilometre of physical testing.
Integrating and validating the full autonomy stack — perception, prediction, path planning, and control — within the virtual testing environment for comprehensive SIL and HIL validation.
Scaling simulation workloads to cloud compute clusters — executing millions of scenario variants in parallel to achieve the coverage density required for UNECE WP.29 and OEM safety gateway requirements.
Building the simulation-based safety case and regulatory submission package — developing the safety argumentation, evidence chain, and ODD definition required for L2+/L3 system homologation.
ANALYSIS TYPE / 04
virtual sensors · ADAS prototyping · cost-effective innovation
Our simulation suite offers a comprehensive solution for accelerating the development of advanced driver assistance systems (ADAS) and autonomous driving (AD) technologies. Virtual sensor simulations validate intelligent headlamp behaviour and streamline ADAS/AD system development as a cost-effective alternative to physical prototypes.
Key Aspects
Rapidly prototyping and evaluating new sensor configurations — antenna patterns, mounting positions, and FOV trade-offs — in simulation before committing to physical hardware procurement.
Developing and calibrating ADAS functions — AEB, LKA, ACC, BSD — against simulated scenarios covering the full operational design domain at a fraction of the cost of physical test fleets.
Constructing structured scenario libraries at abstract, logical, and concrete levels to systematically cover the ODD and identify edge cases that challenge ADAS perception and decision logic.
Achieving up to a 100,000x reduction in validation cost and time — through at least a 100x decrease from drive virtualisation and an additional 1000x from adaptive optimisation in the cloud.
Connect with our team to discuss sensor simulation, intelligent headlamp validation, AV software simulation, or ADAS/AD system development for your programme.